Détermination de communes survolées par une trajectoire
Un problème intéressant à partir d’une trajectoire d’un avion (que l’on peut récupérer par exemple par ADS-B) est de déterminer les communes qui voient leur territoire survolé par cette trajectoire. Ce calcul peut notamment servir à mesurer l’impact environnemental (émissions de polluants, impact sonore, etc.) du trafic aérien.
Les données concernées sont :
- les communes sont formées de polygones en coordonnées x-y (projection Lambert 93) ; on utilise ici la base GEOFLA de l’IGN pour les communes d’Île-de-France ;
- une trajectoire est formée d’échantillons, des quadruplets (t, x, y, z) pour le temps, l’abcisse, l’ordonnée et l’altitude barométrique.
Dans un contexte contraint par la performance, la méthode naïve consistant pour chaque point à tester son appartenance à un polygone (une commune) n’est pas raisonnable. On étudie ici l’organisation des données en quadtree.
Présentation des données
import os.path
import fiona
from shapely.geometry import shape
fullpath = os.path.join(os.path.expanduser("~"), 'Documents', 'data',
'GEOFLA_2-0_COMMUNE_SHP_LAMB93_FXX_2015-07-01',
'GEOFLA', '1_DONNEES_LIVRAISON_2015',
'GEOFLA_2-0_SHP_LAMB93_FR-ED151',
'COMMUNE', 'COMMUNE.SHP')
idf = [p for p in fiona.open(fullpath)
if p['properties']['NOM_REG']== 'ILE-DE-FRANCE']
shapes = []
for item in idf:
s = shape(item['geometry'])
if s.geom_type == "MultiPolygon":
# seulement Châteaufort pour une raison bizarre...
s = s[0]
shapes.append(s)
print("{} communes en Île-de-France".format(len(idf)))
1299 communes en Île-de-France
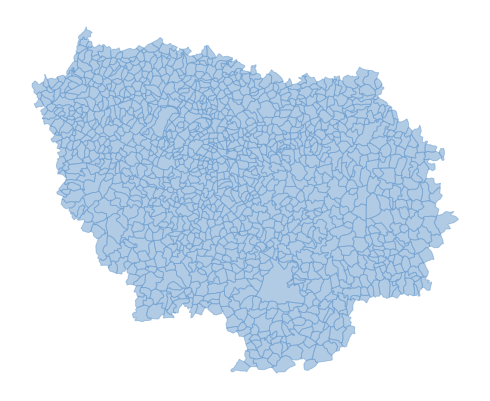
On peut alors afficher les communes d’Île-de-France sur une carte
%matplotlib inline
import matplotlib.pyplot as plt
from descartes import PolygonPatch
fig = plt.figure(figsize=(15, 7))
ax = fig.gca()
for s in shapes:
ax.add_patch(PolygonPatch(s, fc='#6699cc', ec='#6699cc',
alpha=0.5, zorder=2))
bbox = ax.axis('scaled')
ax.set_xticks([])
ax.set_yticks([])
ax.set_frame_on(False)
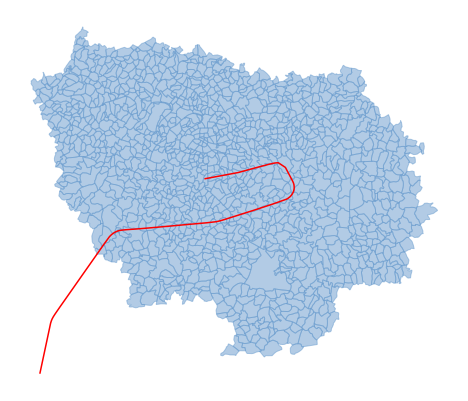
On utilise la trajectoire ci-jointe (prétraitée) d’un vol qui atterrit à Paris-Orly.
On peut d’ores et déjà filtrer la trajectoire à tous les points en dessous de 5000 pieds.
import pandas as pd
traj = pd.read_pickle('../extra/trajectory.pkl')
# On s'intéresse à la trajectoire en dessous de 5000 pieds
traj = traj[traj.baroaltitude < 5000]
fig = plt.figure(figsize=(15, 7))
ax = fig.gca()
for s in shapes:
ax.add_patch(PolygonPatch(s, fc='#6699cc', ec='#6699cc',
alpha=0.5, zorder=2))
ax.plot(traj.lamb93_x, traj.lamb93_y, '-r')
# Finitions
bbox = ax.axis('scaled')
ax.set_xticks([])
ax.set_yticks([])
ax.set_frame_on(False)
Structure de données
Un quadtree est une structure arborescente dans laquelle chaque nœud a quatre fils. On subdivise récursivement chacun des nœuds quand il devient trop lourd.
Le cas d’utilisation classique de cette structure est un test d’appartenance. On souhaite tester si un élément est présent dans une structure de données énumérable. Au lieu de faire n tests d’égalité sur chacun des éléments de la structure, on fait quelques tests géométriques (autant que la profondeur de l’arbre) pour retrouver le nœud dans lequel devrait se trouver l’élément puis des tests d’égalité sur les éléments présents dans la feuille : le nombre de tests est alors borné.
Pour le cas d’étude qui nous préoccupe, on manipule des points et des polygones : on va alors placer des communes (polygones) dans un arbre (quadtree) ; puis pour chaque point à tester, on ne testera son appartenance qu’à un nombre borné de communes. Une commune n’étant pas un point, il faut bien prendre soin de dupliquer les communes dans plusieurs nœuds de l’arbre si besoin.
class Quadtree(object):
"""
Quadtree qui permet d'insérer des polygones dans plusieurs
sous-cellules.
Création:
>>> q = Quadtree(x_min, x_max, y_min, y_max)
Insertion d'un polygone dans les bonnes feuilles du
quadtree (parfois plusieurs):
>>> q.insert(polygon)
Le polygone doit être muni de l'opération `in_bbox`.
Recherche d'une commune survolée par un point:
>>> q.match((x, y))
La méthode renvoie le premier polygone qui contient le
point (x, y).
"""
def __init__(self, x_min, x_max, y_min, y_max, size_max=8):
"""
- x_min, x_max, y_min, y_max sont les bornes de la
bounding box;
- `dx`, `dy` sont les points médians;
- `children` contient les sous-arbres;
- `elements` contient les communes (si le nœud est une
feuille);
- `size` vaut la taille de `elements` si le nœud est une
feuille, None sinon;
- `size_max` borne la taille de `elements`.
"""
self.x_min, self.x_max = x_min, x_max
self.y_min, self.y_max = y_min, y_max
self.dx = (x_min + x_max)/2
self.dy = (y_min + y_max)/2
self.children = []
self.elements = []
self.size = 0
self.size_max = size_max
def insert(self, element):
if self.size is None:
# IMPORTANT : les tests ne sont pas exclusifs!
# On peut ajouter une commune à plusieurs sous-arbres
if element.in_bbox(self.x_min, self.dx,
self.y_min, self.dy):
self.children[0].insert(element)
if element.in_bbox(self.dx, self.x_max,
self.y_min, self.dy):
self.children[1].insert(element)
if element.in_bbox(self.x_min, self.dx,
self.dy, self.y_max):
self.children[2].insert(element)
if element.in_bbox(self.dx, self.x_max,
self.dy, self.y_max):
self.children[3].insert(element)
return
if self.size < self.size_max:
# s'il y a encore de la place
self.elements.append(element)
self.size += 1
else:
# sinon on subdivise...
self.children.append(Quadtree(self.x_min, self.dx,
self.y_min, self.dy))
self.children.append(Quadtree(self.dx, self.x_max,
self.y_min, self.dy))
self.children.append(Quadtree(self.x_min, self.dx,
self.dy, self.y_max))
self.children.append(Quadtree(self.dx, self.x_max,
self.dy, self.y_max))
self.size = None # Le nœud n'est plus une feuille
# puis on redispatche les éléments du nœud dans les fils
for e in self.elements:
self.insert(e)
# on nettoie pour éviter les fuites...
self.elements.clear()
# sans oublier d'ajouter l'élément qui a tout déclenché
self.insert(element)
def match(self, point):
if self.size is not None:
# si le nœud est une feuille, on recherche le 1er polygone
for e in self.elements:
if e.inside(point[0], point[1]):
return e
# pas trouvé
return None
# on construit l'index du sous-arbre dans lequel se place le point
idx = 0
if point[1] >= self.dy:
idx += 2
if point[0] >= self.dx:
idx += 1
# puis on lance la recherche de manière récursive
return self.children[idx].match(point)
def plot(self, color="#999999"):
""" À but illustratif ci-dessous """
plt.plot([self.x_min, self.x_min, self.x_max,
self.x_max, self.x_min],
[self.y_min, self.y_max, self.y_max,
self.y_min, self.y_min],
'-.' if color=="#999999" else '-',
lw=1 if color=="#999999" else 2,
color=color)
On peut à présent construire le quadtree sur la bounding box du plot précédent.
q = Quadtree(*bbox)
Le test d’appartenance d’un point à un polygone peut se découper en deux parties :
- la première peut se factoriser et s’exécuter à la création du polygone (constructeur
__init__) ; - la deuxième est différente pour chaque point à tester (méthode
inside)
import numpy as np
from collections import Iterable
class Polygon(object):
"""Test if a point falls inside in a Polygon.
>>> polyX = [0, 0, 1, 1]
>>> polyY = [0, 1, 1, 0]
>>> p = Polygon(polyX, polyY)
>>> p.inside(0.5, 0.5)
True
>>> p.inside(1.5, 0.5)
False
>>> p.inside(-1.5, 0.5)
False
"""
def __init__(self, polyX, polyY):
self.polycorners = len(polyX)
self.constant = np.zeros(self.polycorners)
self.multiple = np.zeros(self.polycorners)
self.polyX, self.polyY = polyX, polyY
j = self.polycorners - 1
for i in range(self.polycorners):
if polyY[j] == polyY[i]:
self.constant[i] = polyX[i]
self.multiple[i] = 0
else:
self.constant[i] = polyX[i]
self.constant[i] -= (polyY[i]*polyX[j])/(polyY[j]-polyY[i])
self.constant[i] += (polyY[i]*polyX[i])/(polyY[j]-polyY[i])
self.multiple[i] = (polyX[j]-polyX[i])/(polyY[j]-polyY[i])
j = i
def inside(self, x, y):
if not isinstance(x, Iterable):
x, y = np.array([x]), np.array([y])
else:
x, y = np.array(x), np.array(y)
j = self.polycorners - 1
oddNodes = np.zeros_like(x, dtype=bool)
for i in range(self.polycorners):
tab1 = np.bitwise_and(self.polyY[i] < y, self.polyY[j] >= y)
tab2 = np.bitwise_and(self.polyY[j] < y, self.polyY[i] >= y)
mask = np.bitwise_or(tab1, tab2)
new_val = y[mask] * self.multiple[i] + self.constant[i] < x[mask]
oddNodes[mask] = np.bitwise_xor(oddNodes[mask], new_val)
j = i
if (oddNodes.shape[0] == 1):
oddNodes = oddNodes[0]
return oddNodes
On complète un peu cette classe générique pour les besoins de notre application.
Il faut en effet coder la méthode in_bbox.
class Commune(Polygon):
"""
Une commune est un polygone avec un nom et une fonction in_bbox
pour le quadtree ci-dessus.
"""
def __init__(self, polyX, polyY, name, **kwargs):
self.name = name
Polygon.__init__(self, np.asarray(polyX), np.asarray(polyY))
def in_bbox(self, xmin, xmax, ymin, ymax):
val = self.polyX >= xmin
val &= self.polyX <= xmax
val &= self.polyY >= ymin
val &= self.polyY <= ymax
return sum(val) > 0
La construction du quadtree peut-être un peu coûteuse car le traitement n’est exécuté qu’une seule fois. On compte quelques secondes sur un ordinateur de bureau. On profite du champ name pour garder les informations remplies par l’IGN dans le OrderedDict de propriétés.
for i, s in zip(idf, shapes):
x, y = list(zip(*s.exterior.coords))
c = Commune(x, y, name=i['properties'])
q.insert(c)
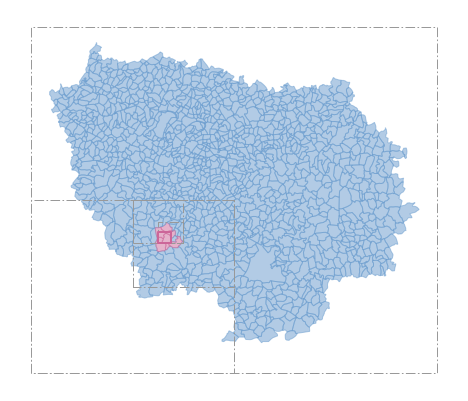
On peut alors visualiser une partie du quadtree. En suivant un chemin particulier, on trace sur la figure ci-dessous les subdivisions récursives de l’arbre puis on colore les communes qui sont situées dans la feuille en question.
fig = plt.figure(figsize=(20, 10))
ax = fig.gca()
coloured = [commune.name for commune in
q.children[0].children[3].children[2].children[1].children[0].elements]
msg = "La feuille en question contient {} communes"
print(msg.format(len(coloured)))
for i, s in zip(idf, shapes):
prop = {'fc': '#6699cc', 'ec': '#6699cc'}
if i['properties'] in coloured:
prop = {'fc': '#cc6699', 'ec': '#cc6699'}
ax.add_patch(PolygonPatch(s, alpha=0.5, zorder=2, **prop))
q.plot()
q.children[0].plot()
q.children[0].children[3].plot()
q.children[0].children[3].children[2].plot()
q.children[0].children[3].children[2].children[1].plot()
q.children[0].children[3].children[2].children[1].children[0].plot(color="#cc6699")
# Finitions
ax.axis('scaled')
ax.set_xticks([])
ax.set_yticks([])
ax.set_frame_on(False)
La feuille en question contient 6 communes
Tests de performance
On manipule une trajectoire de 1325 points. On va garder dans through les communes traversées par la trajectoire.
traj.shape
(1325, 3)
On compte 4 ms sur un ordinateur de bureau pour trouver la commune survolée par le dernier point de la trajectoire.
%%time
q.match((traj.lamb93_x.values[-1], traj.lamb93_y.values[-1])).name
CPU times: user 1.89 ms, sys: 0 ns, total: 1.89 ms
Wall time: 1.89 ms
OrderedDict([('ID_GEOFLA', 'COMMUNE00000000000032919'),
('CODE_COM', '479'),
('INSEE_COM', '91479'),
('NOM_COM', 'PARAY-VIEILLE-POSTE'),
('STATUT', 'Commune simple'),
('X_CHF_LIEU', 653111),
('Y_CHF_LIEU', 6845527),
('X_CENTROID', 652844),
('Y_CENTROID', 6847571),
('Z_MOYEN', 85),
('SUPERFICIE', 606),
('POPULATION', 7230),
('CODE_CANT', '02'),
('CODE_ARR', '3'),
('CODE_DEPT', '91'),
('NOM_DEPT', 'ESSONNE'),
('CODE_REG', '11'),
('NOM_REG', 'ILE-DE-FRANCE')])
%%time
through = []
for x_, y_ in zip(traj.lamb93_x, traj.lamb93_y):
m = q.match((x_, y_))
if m is not None:
through.append(m.name)
CPU times: user 2.22 s, sys: 20.4 ms, total: 2.24 s
Wall time: 2.16 s
L’approche naïve pour la trajectoire complète est correcte (moins de 2s). On peut toutefois être plus malin en considérant la temporalité de la trajectoire: si un point survole une commune, il y a de grandes chances que le point suivant survole la même commune:
%%time
through = []
prev = None
for x_, y_ in zip(traj.lamb93_x, traj.lamb93_y):
if prev is not None:
if prev.inside(x_, y_):
continue
m = q.match((x_, y_))
if m is not None:
through.append(m.name)
prev = m
CPU times: user 703 ms, sys: 8.8 ms, total: 712 ms
Wall time: 697 ms
On peut faire mieux:
- en réduisant encore la taille limite avant subdivision du quadtree;
- en réduisant la résolution des polygones des communes: l’algorithme de Visvalingam fonctionne bien pour cela;
- en changeant de langage de programmation (langage typé/compilé à la C++) et en parallélisant les calculs (duplication du quadtree et parallélisation par batch de trajectoires).
Affichage des résultats
On reprend la carte précédente pour colorer les communes survolées.
Il faut bien noter que l’algorithme ne colore que les communes survolées par les points enregistrés de la trajectoire. On devine que certaines communes sont survolées sans être colorées; si ce problème est réel sur les données de production, il conviendra certainement d’interpoler la trajectoire à l’endroit où des échantillons manquent.
# Pour afficher le résultat, on passe en rouge les communes survolées
fig = plt.figure(figsize=(20, 10))
ax = fig.gca()
for i, s in zip(idf, shapes):
prop = {'fc': '#6699cc', 'ec': '#6699cc'}
if i['properties'] in through:
prop = {'fc': '#cc6699', 'ec': '#cc6699'}
ax.add_patch(PolygonPatch(s, alpha=0.5, zorder=2, **prop))
ax.scatter(traj.lamb93_x, traj.lamb93_y, c='r', s=.2)
# Finitions
bbox = ax.axis('scaled')
ax.set_xticks([])
ax.set_yticks([])
ax.set_frame_on(False)
", ".join(commune['NOM_COM'] for commune in through)
'ORSONVILLE, PRUNAY-EN-YVELINES, ORSONVILLE, ABLIS, SONCHAMP, PONTHEVRARD,
SAINTE-MESME, SAINT-ARNOULT-EN-YVELINES, DOURDAN, SAINT-CYR-SOUS-DOURDAN,
LE VAL-SAINT-GERMAIN, SAINT-MAURICE-MONTCOURONNE, SAINT-CHERON, BREUX-JOUY,
BREUILLET, SAINT-YON, BOISSY-SOUS-SAINT-YON, EGLY, AVRAINVILLE, GUIBEVILLE,
MAROLLES-EN-HUREPOIX, LEUDEVILLE, VERT-LE-GRAND, ECHARCON, LISSES, VILLABE,
CORBEIL-ESSONNES, SAINTRY-SUR-SEINE, SAINT-PIERRE-DU-PERRAY, SAVIGNY-LE-
TEMPLE, LIEUSAINT, MOISSY-CRAMAYEL, EVRY-GREGY-SUR-YERRE, LIMOGES-FOURCHES,
SOIGNOLLES-EN-BRIE, SOLERS, OZOUER-LE-VOULGIS, CHAUMES-EN-BRIE, CHATRES,
TOURNAN-EN-BRIE, FAVIERES, PONTCARRE, ROISSY-EN-BRIE, OZOIR-LA-FERRIERE,
ROISSY-EN-BRIE, OZOIR-LA-FERRIERE, PONTAULT-COMBAULT, LA QUEUE-EN-BRIE,
SUCY-EN-BRIE, BOISSY-SAINT-LEGER, PARAY-VIEILLE-POSTE'
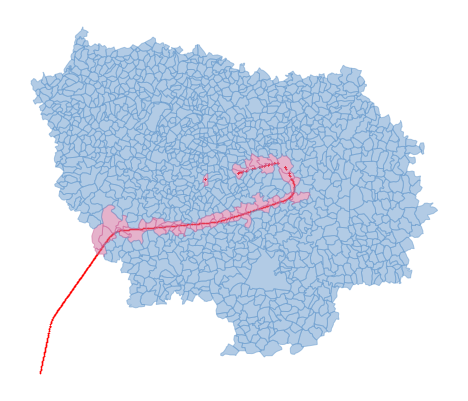
À noter que les dernières communes survolées ne sont pas colorées par manque de points enregistrés en basse altitude sur l’approche finale.


