optim4ai
Optimisation for Artificial Intelligence, a 4-day course
Automatic differentiation
« Previous | Up ↑ | Next »
There are basically two additional functionalities provided by tensors:
- you can send them to GPU for faster parallel computations (but avoid Python functions and loops like the plague and focus on torch implementations to really benefit from them);
# we use "cpu" if we don't want to make things complicated
>>> torch.ones(1, device=0)
tensor([1.], device='cuda:0')
- (the most precious) computations propagate their gradient values!
>>> x0 = torch.ones(1, requires_grad=True)
>>> y0 = x0 ** 2
>>> y0.backward()
>>> x0.grad
tensor([2.])
Can you confirm you really expected the value 2 here?
Solution (click to unfold)
The derivative of the function $x \mapsto x^2$ is $x \mapsto 2\,x$ which evaluates to 2 for $x=1$.So let’s now come back to the initialisation of our city placement problem:
import numpy as np
cities = [
'Amsterdam', 'Athens', 'Barcelone', 'Belgrade', 'Berlin',
'Brussels', 'Bucarest', 'Budapest', 'Copenhagen', 'Dublin',
'Gibraltar', 'Helsinki', 'Istanbul', 'Kiev', 'Kiruna',
'Lisbon', 'London', 'Madrid', 'Milan', 'Moscow', 'Munich',
'Oslo', 'Paris', 'Prague', 'Reykjavik', 'Riga', 'Rome',
'Sofia', 'Stockholm', 'Tallinn', 'Toulouse', 'Trondheim',
'Varsovie', 'Vienne', 'Vilnius', 'Zurich'
]
n = len(cities)
distances = np.load("distances.npy")
# initial random position
x0 = np.random.normal(size=(n, 2))
# normalize distance matrix
l1, l2 = np.meshgrid(x0[:, 0], x0[:, 0])
r1, r2 = np.meshgrid(x0[:, 1], x0[:, 1])
x0 /= np.linalg.norm(np.sqrt((l1 - l2) ** 2 + (r1 - r2) ** 2))
distances /= np.linalg.norm(distances)
Things will not change much with PyTorch: but we will not fail to specify that we don’t want to compute the gradient, because it was really tedious.
Let’s attach the distance matrix to the GPU for our computation, but apart from that, the API is really similar:
distances = torch.Tensor(distances).to(0)
distances /= torch.linalg.norm(distances)
Let’s put this all in a function as we are going to reinitialise it several times in the following:
def init_t0():
t0 = torch.randn(
(n, 2), dtype=float, requires_grad=True, device=0
)
with torch.no_grad():
l1, l2 = torch.meshgrid(t0[:, 0], t0[:, 0])
r1, r2 = torch.meshgrid(t0[:, 1], t0[:, 1])
t0 /= torch.linalg.norm(
torch.sqrt((l1 - l2) ** 2 + (r1 - r2) ** 2)
)
return t0
t0 = init_t0()
This implementation we had is a bit awkward for torch, so let’s benefit from the cdist function which computes exactly the same code, without the (buzzkill) loop:
def criterion(*args):
"""Compute the map reconstruction objective function.
Vector reshaped for more readability.
"""
res = 0
x = np.array(args).reshape((n, 2)) # tuple -> np.array (2D)
for i in range(n):
for j in range(i + 1, n):
(x1, y1), (x2, y2) = x[i, :], x[j, :]
delta = (
(x2 - x1) ** 2 + (y2 - y1) ** 2
- distances[i, j] ** 2
)
res += delta ** 2
return res
def criterion(x: torch.Tensor):
delta = torch.cdist(x, x) ** 2 - distances ** 2
return (delta ** 2).sum() / 2
loss = criterion(t0)
loss
# tensor(0.0007, device='cuda:0', dtype=torch.float64, grad_fn=<DivBackward0>)
We named the variable loss here, because that is the metric we usually want to minimise in a neural network. Here, we basically implemented a distance based loss. And the great thing, is that we got the gradient for free!
>>> loss.backward()
>>> t0.grad
tensor([[ 1.6303e-03, 1.2010e-04],
[ 2.7972e-05, -4.3371e-05],
# truncated
[-1.4092e-03, -2.6484e-03],
[ 1.2767e-03, -4.2169e-04],
[-2.3571e-03, 7.6526e-03],
[-3.6612e-04, -4.5860e-04]], device='cuda:0', dtype=torch.float64)
So let’s give it a first shot with a naive constant step (we call it a learning rate) gradient descent:
from tqdm import tqdm
n_epochs = 4000
learning_rate = 1e-1
loss_values = list()
t0 = init_t0()
for i in tqdm(range(n_epochs)):
loss = criterion(t0)
loss.backward()
# bring the loss back to Earth
loss_values.append(loss.cpu().detach().numpy().item())
# we need this guard because we want to update t0 based on
# its gradient which would change its gradient, so let's
# stop keeping track of gradient
with torch.no_grad():
t0 -= learning_rate * t0.grad
t0.grad.zero_()
100%|█████████████████████| 4000/4000 [00:05<00:00, 725.82it/s]
We can check the convergence of the algorithm (it is common practice to have it in semi-log).
import matplotlib.pyplot as plt
fig, ax = plt.subplots(figsize=(7, 5))
ax.semilogy(loss_values)
ax.spines["right"].set_visible(False)
ax.spines["top"].set_visible(False)
ax.spines["left"].set_position(("data", 0))
ax.tick_params(pad=5, labelsize=12)
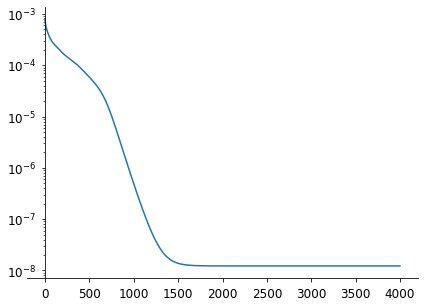
It is quite slow actually… so much for GPU!
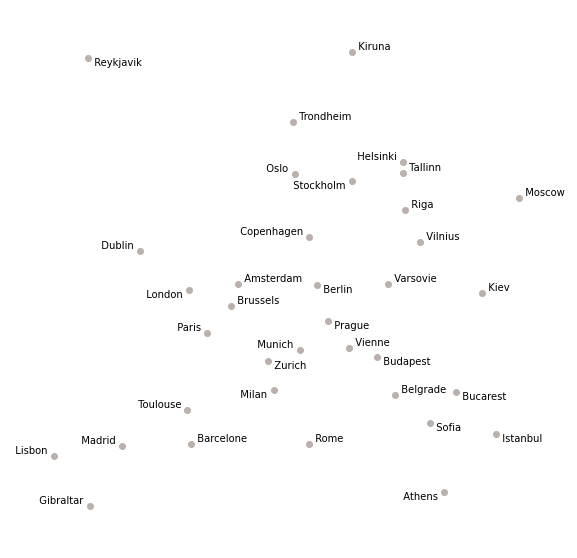
Remember we converged within 34 iterations with SciPy BFGS, but we have things in place, and we can confirm city placement is correct:
fig, ax = plt.subplots(figsize=(10, 10))
plot_cities(ax, t0)
« Previous | Up ↑ | Next »